
目录
快速导航-
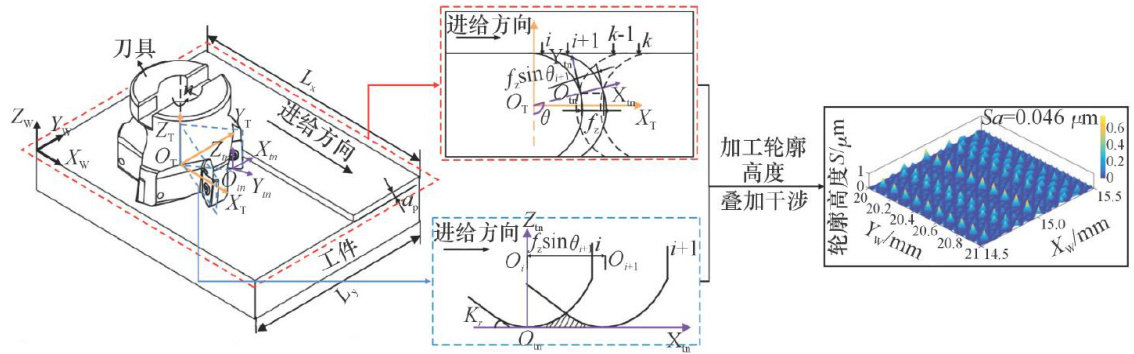
机械基础工程 | 难加工金属材料切削表面完整性预测与调控
机械基础工程 | 难加工金属材料切削表面完整性预测与调控
-
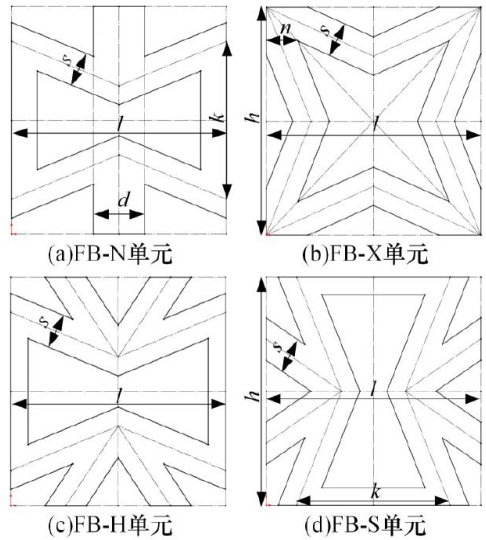
机械基础工程 | 负泊松比管状支架结构的压缩刚度特性分析
机械基础工程 | 负泊松比管状支架结构的压缩刚度特性分析
-
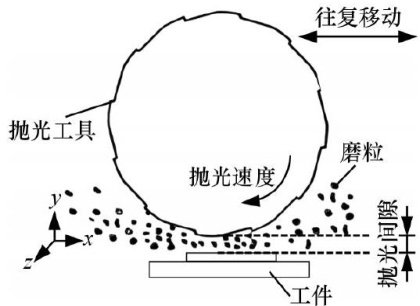
机械基础工程 | 基于复合结构抛光工具的铜衬底线性液动压抛光加工
机械基础工程 | 基于复合结构抛光工具的铜衬底线性液动压抛光加工
-
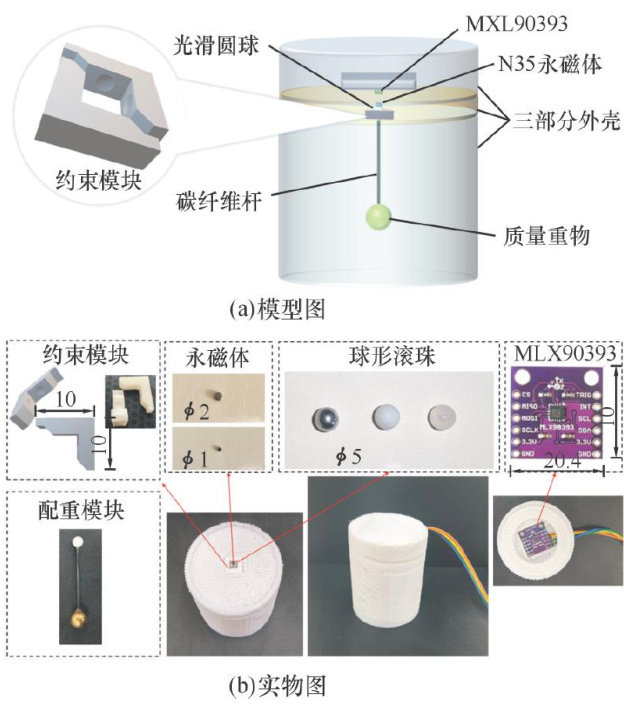
机械基础工程 | 磁-重力耦合悬垂平衡的全向倾角传感器优化设计
机械基础工程 | 磁-重力耦合悬垂平衡的全向倾角传感器优化设计
-
机械基础工程 | 动力学模态解耦的工业机器人加工颤振规避方法
机械基础工程 | 动力学模态解耦的工业机器人加工颤振规避方法
-
机械基础工程 | 含间隙空间并联机构刚柔耦合动力学分析与试验
机械基础工程 | 含间隙空间并联机构刚柔耦合动力学分析与试验
-
机械基础工程 | 负半径滚子直动推杆盘形凸轮机构运动保真及其解域研究
机械基础工程 | 负半径滚子直动推杆盘形凸轮机构运动保真及其解域研究
-
机械基础工程 | 面向夹层结构柔顺度优化的代理模型辅助差分进化算法
机械基础工程 | 面向夹层结构柔顺度优化的代理模型辅助差分进化算法
-

机械基础工程 | 超高压水射流自驱旋转喷头空间布局优化
机械基础工程 | 超高压水射流自驱旋转喷头空间布局优化
-
智能制造 | 薄壁筒件机器人铣削颤振识别及抑制方法研究
智能制造 | 薄壁筒件机器人铣削颤振识别及抑制方法研究
-

智能制造 | 基于一维结构图熵的滚动轴承早期故障检测
智能制造 | 基于一维结构图熵的滚动轴承早期故障检测
-

智能制造 | 基于NSST4-SVD-DBN的带式输送机托辊轴承故障诊断方法
智能制造 | 基于NSST4-SVD-DBN的带式输送机托辊轴承故障诊断方法
-
智能制造 | 基于改进的EfficientNetV2和UNetTSF的刀具磨损状态识别及预测方法
智能制造 | 基于改进的EfficientNetV2和UNetTSF的刀具磨损状态识别及预测方法
-
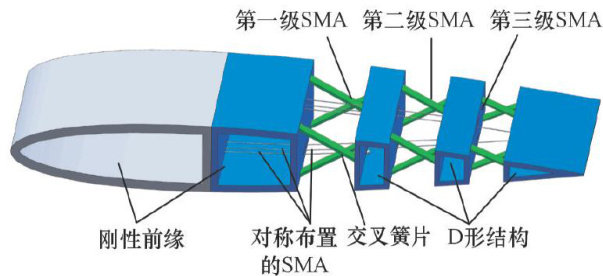
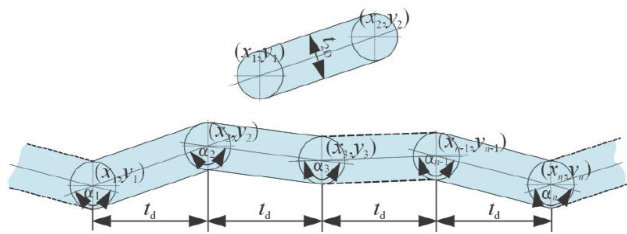
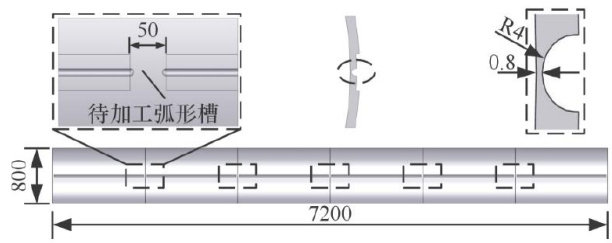
智能制造 | 基于多级形状记忆合金驱动的变弯度机翼多状态变形模糊控制
智能制造 | 基于多级形状记忆合金驱动的变弯度机翼多状态变形模糊控制
-

智能制造 | 基于多尺度域生成网络的冷水机组故障诊断
智能制造 | 基于多尺度域生成网络的冷水机组故障诊断
-
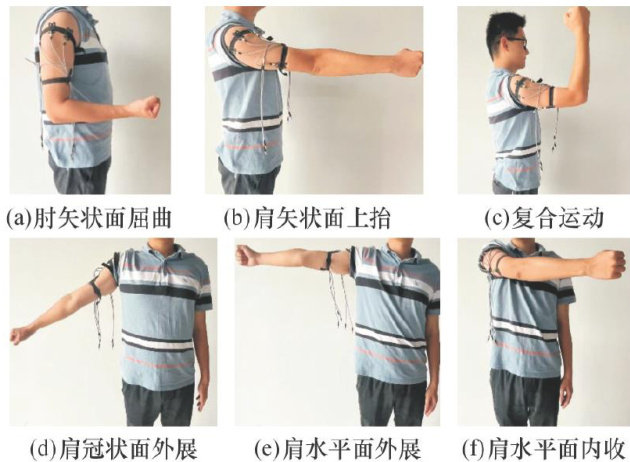
智能制造 | 基于双流卷积神经网络的表面肌电信号上肢动作识别
智能制造 | 基于双流卷积神经网络的表面肌电信号上肢动作识别
-
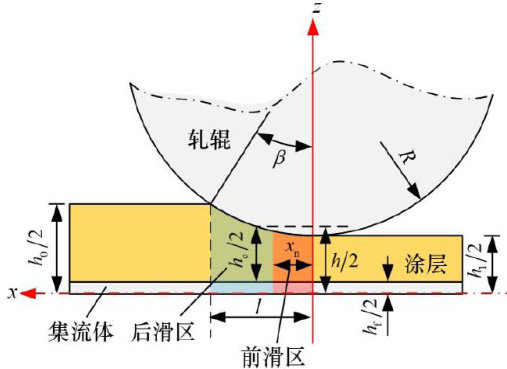
先进材料加工工程 | 基于Kuhn屈服准则的锂离子电池极片辊压力建模与分析
先进材料加工工程 | 基于Kuhn屈服准则的锂离子电池极片辊压力建模与分析
-
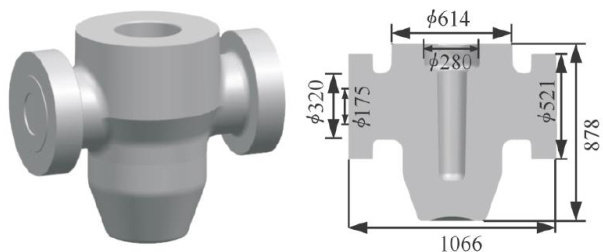
先进材料加工工程 | 大型高压阀体多向模锻成形工艺及晶粒组织演变预测
先进材料加工工程 | 大型高压阀体多向模锻成形工艺及晶粒组织演变预测
-
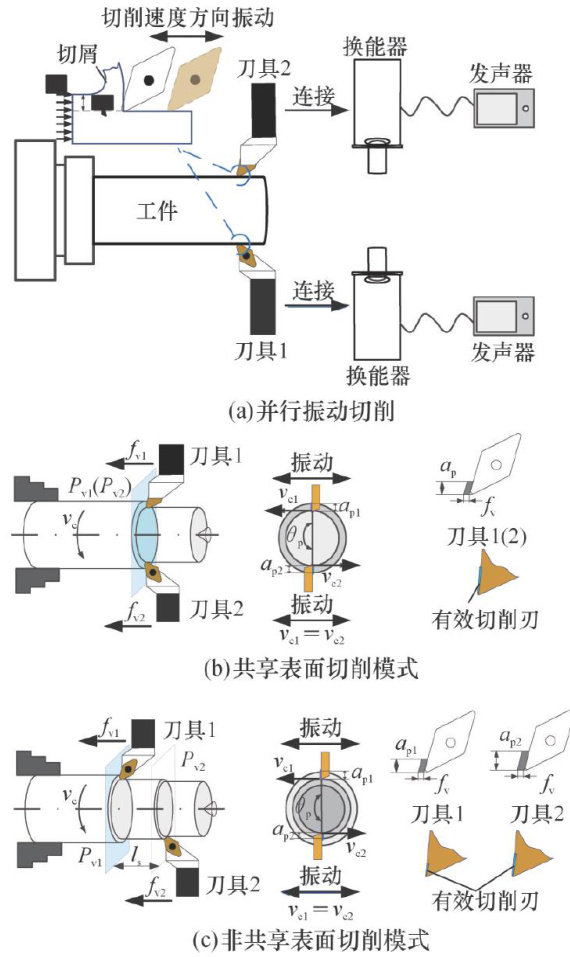
先进材料加工工程 | 并行超声振动切削对钛合金轴表面完整性的影响研究
先进材料加工工程 | 并行超声振动切削对钛合金轴表面完整性的影响研究
-

工程前沿 | 考虑曲率扰动的车辆自适应预瞄路径跟踪算法
工程前沿 | 考虑曲率扰动的车辆自适应预瞄路径跟踪算法
-

工程前沿 | 分布式全液压压裂车驱动系统振动溯源及抑制
工程前沿 | 分布式全液压压裂车驱动系统振动溯源及抑制
-
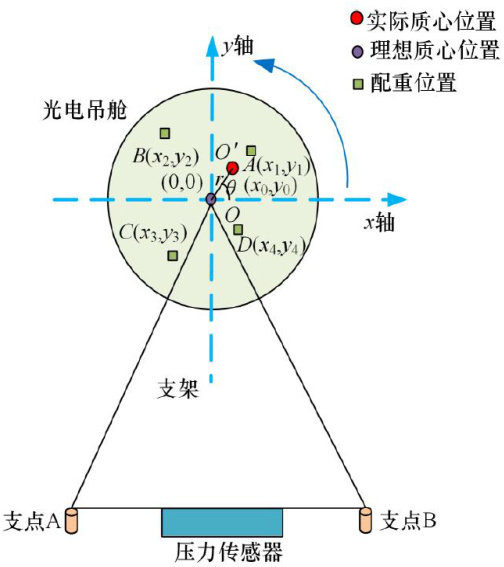
工程前沿 | 信赖域与增广拉格朗日算法融合的光电吊舱静平衡配平优化
工程前沿 | 信赖域与增广拉格朗日算法融合的光电吊舱静平衡配平优化
-
学会资讯 | 2026工业母机产业链高质量发展大会(一号通知)
学会资讯 | 2026工业母机产业链高质量发展大会(一号通知)








 登录
登录